

|
| MOQ: | 1 |
| Prijs: | US $3500.00 - 4880.00/ Set |
| Standaardverpakking: | Kartonnen doos/houten kist |
| Leveringstermijn: | 6~8 weken |
| Betalingswijze: | T/T |
| Toeleveringskapaciteit: | 500 sets per jaar |
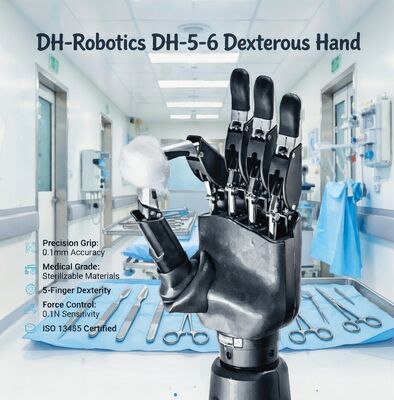
De DH-5-6 van DH-Robotics is een 5-vingers handige robothand met 6 actieve DOF's, gebouwd voor humanoïde robots, collaboratieve toepassingen en onderzoek.Het maakt gebruik van pees aangedreven activering met micro lineaire actuatoren en ondersteunt kracht / tactiele perceptie voor een veilig en nauwkeurig grijpenHet product legt de nadruk op kosteneffectiviteit en biedt een menselijke behendigheid.
| Parameter | Specificatie |
|---|---|
| Vingers | 5 vingers (mens) |
| Actieve DOF | 6 |
| Totaal van de gewrichten | 12 |
| Activering | met een vermogen van niet meer dan 50 W |
| Gevoel | Kracht/tactiele sensoren |
| Controlemodus | Hybride positie-kracht |
| Communicatie | CAN / RS485 / EtherCAT |
| Gewicht | Ongeveer 400-550 g. |
| Grijpkracht (per vinger) | 5 ̊15 N typisch |
Stuur ons alsjeblieft:
|
|
| MOQ: | 1 |
| Prijs: | US $3500.00 - 4880.00/ Set |
| Standaardverpakking: | Kartonnen doos/houten kist |
| Leveringstermijn: | 6~8 weken |
| Betalingswijze: | T/T |
| Toeleveringskapaciteit: | 500 sets per jaar |
De DH-5-6 van DH-Robotics is een 5-vingers handige robothand met 6 actieve DOF's, gebouwd voor humanoïde robots, collaboratieve toepassingen en onderzoek.Het maakt gebruik van pees aangedreven activering met micro lineaire actuatoren en ondersteunt kracht / tactiele perceptie voor een veilig en nauwkeurig grijpenHet product legt de nadruk op kosteneffectiviteit en biedt een menselijke behendigheid.
| Parameter | Specificatie |
|---|---|
| Vingers | 5 vingers (mens) |
| Actieve DOF | 6 |
| Totaal van de gewrichten | 12 |
| Activering | met een vermogen van niet meer dan 50 W |
| Gevoel | Kracht/tactiele sensoren |
| Controlemodus | Hybride positie-kracht |
| Communicatie | CAN / RS485 / EtherCAT |
| Gewicht | Ongeveer 400-550 g. |
| Grijpkracht (per vinger) | 5 ̊15 N typisch |
Stuur ons alsjeblieft:

