|
|
| MOQ: | 1 |
| Prijs: | US $3500.00 - 4900.00/ Set |
| Standaardverpakking: | Kartonnen doos/houten kist |
| Leveringstermijn: | 6~8 weken |
| Betalingswijze: | T/T |
| Toeleveringskapaciteit: | 500 sets per jaar |
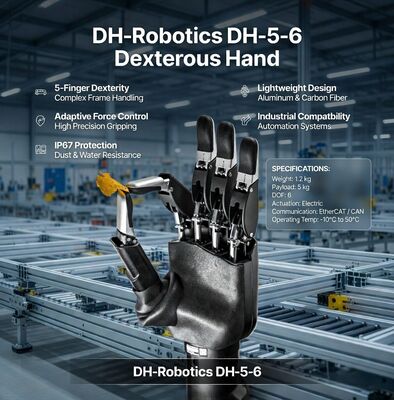
De DH-Robotics DH-5-6 is een 5-vingerige, pees-aangedreven, behendige robot hand met 6 actieve vrijheidsgraden. Het is ontworpen voor humanoïde robots, collaboratieve robots en onderzoeksplatforms die mensachtige grijpkracht, krachtregeling en perceptie vereisen. De hand maakt gebruik van geïntegreerde micro lineaire actuatoren en ondersteunt hybride positie-krachtregeling voor precieze en conforme manipulatie.
| Parameter | Specificatie |
|---|---|
| Vingers | 5 vingers (antropomorf) |
| Actieve Vrijheidsgraden | 6 |
| Totaal Aantal Gewrichten | 12 |
| Aandrijfsysteem | Pees-aangedreven met micro lineaire actuatoren |
| Sensoren | Kracht / tactiele sensoren |
| Besturingsmodus | Hybride positie + krachtregeling |
| Communicatie | CAN / RS485 / EtherCAT |
| Gewicht | Ongeveer 400–550 g |
| Grijpkracht per vinger | 5–15 N per vinger (typisch) |
Gelieve op te geven:
|
|
| MOQ: | 1 |
| Prijs: | US $3500.00 - 4900.00/ Set |
| Standaardverpakking: | Kartonnen doos/houten kist |
| Leveringstermijn: | 6~8 weken |
| Betalingswijze: | T/T |
| Toeleveringskapaciteit: | 500 sets per jaar |
De DH-Robotics DH-5-6 is een 5-vingerige, pees-aangedreven, behendige robot hand met 6 actieve vrijheidsgraden. Het is ontworpen voor humanoïde robots, collaboratieve robots en onderzoeksplatforms die mensachtige grijpkracht, krachtregeling en perceptie vereisen. De hand maakt gebruik van geïntegreerde micro lineaire actuatoren en ondersteunt hybride positie-krachtregeling voor precieze en conforme manipulatie.
| Parameter | Specificatie |
|---|---|
| Vingers | 5 vingers (antropomorf) |
| Actieve Vrijheidsgraden | 6 |
| Totaal Aantal Gewrichten | 12 |
| Aandrijfsysteem | Pees-aangedreven met micro lineaire actuatoren |
| Sensoren | Kracht / tactiele sensoren |
| Besturingsmodus | Hybride positie + krachtregeling |
| Communicatie | CAN / RS485 / EtherCAT |
| Gewicht | Ongeveer 400–550 g |
| Grijpkracht per vinger | 5–15 N per vinger (typisch) |
Gelieve op te geven: