

|
|
ABB-de robot van het robotwapen IRB4600 CNC met elektrische tang voor oogst en de plaats werken met buigende machine

| Robotversie | Positieherhaalbaarheid RP (mm) | Wegherhaalbaarheid rechts (mm) * |
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
| Robotversies | Bereik (m) | Nuttige lading (kg) | Armload (kg) | |
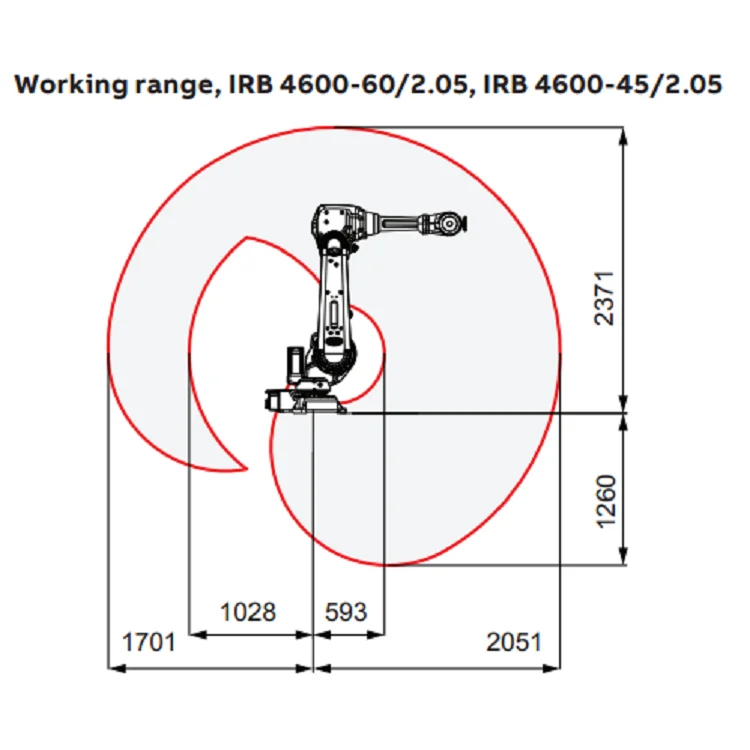
| IRB 4600 60/2.05 | 2.05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2.05 | 45 | 20 | |
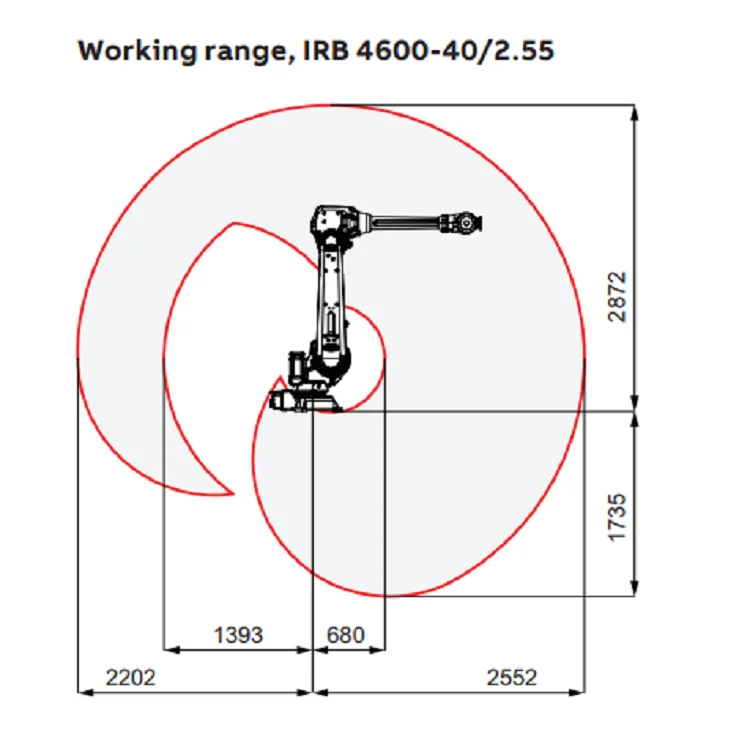
| IRB 4600 40/2.55 | 2.55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2.51 | 20 | 11 | |
| Aantal assen | externe 6+3 (tot 36 met MultiMove) | |||
| Bescherming | Standaardip67, als optiegieterij plus 2 | |||
| Steun | Vloer, omgekeerd of overgehelde plank, | |||
| Controlemechanisme | IRC5 enig kabinet, | |||

|
|
ABB-de robot van het robotwapen IRB4600 CNC met elektrische tang voor oogst en de plaats werken met buigende machine
| Robotversie | Positieherhaalbaarheid RP (mm) | Wegherhaalbaarheid rechts (mm) * |
| IRB 4600 60/2.05 | 0,06 | 0,46 |
| IRB 4600 45/2.05 | 0,05 | 0,13 |
| IRB 4600 40/2.55 | 0,06 | 0,28 |
| IRB 4600 20/2.50 | 0,05 | 0,17 |
| Robotversies | Bereik (m) | Nuttige lading (kg) | Armload (kg) | |
| IRB 4600 60/2.05 | 2.05 | 60 | 20 | |
| IRB 4600 45/2.05 | 2.05 | 45 | 20 | |
| IRB 4600 40/2.55 | 2.55 | 40 | 20 | |
| IRB 4600 20/2.50 | 2.51 | 20 | 11 | |
| Aantal assen | externe 6+3 (tot 36 met MultiMove) | |||
| Bescherming | Standaardip67, als optiegieterij plus 2 | |||
| Steun | Vloer, omgekeerd of overgehelde plank, | |||
| Controlemechanisme | IRC5 enig kabinet, | |||


